推荐阅读:年度必读 重磅发行 !2024智慧城市系列丛书大全套(8套赠1)全新发售!
★申报案例展示★
武汉光谷科学岛全域智能
驾驶场景项目
邓章铁 夏磊 邱成祥
中建三局数字工程有限公司
一.建设背景
1. 建设实施的背景和意义
随着人工智能、物联网等技术的发展,智能交通正在逐步普及和应用。中共中央国务院印发《综合立体交通网综合纲要》,要求加强智能化载运工具和关键专用装备研发,推进智能网联汽车(智能汽车、自动驾驶、车路协同)、智能化通用航空器应用。鼓励物流园区、港口、机场、货运场站广泛应用物联网、自动化等技术。
智能网联车路协同作为智能交通的重要组成部分,以车辆、道路和用户之间的数据互通和协同为核心,实现车路协同,提高道路安全性和交通效率,为人们提供更加便捷、高效、安全的出行服务。
这一技术在全球范围内正在得到大力发展和推广,各国家和地区纷纷制定相关政策和标准,推进智能网联车路协同的应用。
同时各部委全面支持车联网先导区建设,推进车联网大规模试验和商用部署,探索运营模式与商业模式,逐步形成可复制、可推广的建设与发展模式;全面建成世界领先的智能交通系统,领跑世界智能交通的发展。
工信部、公安部、交通运输部、住建部等部门已先后支持建设了17家国家级智能网联汽车测试示范区、4个国家级车联网先导区,2021年确定16个城市作为“双智”试点城市,武汉市获批第一批试点城市。
当前国家战略聚焦科技创新,武汉光谷科学岛位于武汉新城核心,作为科技创新策源高地,依托大科学装置和湖北实验室打造科学中心,引领支撑基础科学研究和前沿科技创新,通过开展智能网联车路系统建设示范,分析识别开放式运营存在问题,为相关企业提供产业发展的技术环境,吸引智能网联、传感器、高精度地图、数据安全等相关领域的优势企业向武汉聚集,积极推动科学岛上位规划落地具有重要意义,也是贯彻落实国家全面建成世界领先的智能交通系统,领跑世界智能交通的发展规划要求。
2. 项目建设的必要性和紧迫性
为落实《武汉市交通强国建设试点实施方案》、《“数字光谷”建设三年行动方案(2023-2025)》、《东湖高新区新能源智能网联汽车产业发展规划》(2022-2030)、《东湖高新区智能网联车路协同创新应用实施方案》(2023-2025年)等文件精神,实现车路协同配套产业集聚、技术创新、商业化应用,助力打造东湖高新区“光芯屏端网+车路云图”万亿产业集群,本项目建设的必要性具体如下:
2.1是建设“交通强国”的需要
为与国际先进智能网联汽车技术水平保持同步发展,开发具有自主知识产权的智能网联汽车产品和技术,中共中央、国务院于2019年9月印发《交通强国建设纲要》。《交通强国建设纲要》是首份从国家层面推动我国走向“交通强国”的发展规划,对于产业发展有重大指导意义。
项目拟对东湖高新区区域交通基础设施进行提升,通过搭建C-V2X网络、车路协同系统等平台,构建东湖高新区完整“车路智行的生态系统”,响应国家建设“交通强国”的号召。
2.2是智慧城市基础设施与智能网联汽车协同发展的需要
智能网联车路协同能够加速新城建与新基建融合,引领智慧交通和智慧城市建设全面协同发展。以支撑智能网联汽车应用和改善城市出行为切入点,建设城市道路、建筑、公共设施融合的感知体系,实现“聪明的车、智能的路、智慧的城”协同发展。以“新城建”对接“新基建”,引领城市转型发展,培育新的经济增长点,发挥城市建设撬动内需的重要支点作用,推动构建新发展格局。
2.3是东湖高新区打造“光芯屏端网+车路云网图”万亿产业集群的需要
东湖高新区具备发展新能源智能网联汽车的良好产业基础。区内已培育和引进了200多家汽车产业链企业,覆盖新能源智能网联汽车上下游研发及生产企业。拥有跨产业融合配套优势。聚集了一批光电子信息产业龙头企业,可与智能网联汽车“车路云网图位”等要素融合配套。项目通过打造车路智行一体化的智能网联体系,为推动在自动驾驶、V2X等技术的研发应用进程奠定坚实基础,不断完善东湖高新区智能网联汽车产业链发展短板与不足,为智能网联汽车产业发展壮大打造氛围、提供环境。
2.4是积极推进光谷科学岛开发建设及上位规划落实的需要
在《数字光谷建设三年行动方案(2023-2025)》、《光谷科技创新大走廊发展战略规划(2021-2035年)》、《东湖高新区新能源智能网联汽车行动方案》、《东湖高新区智能网联车路协同创新应用实施方案》等政策文件都明确指出,“依托武汉双智试点平台,开展核心道路智能网联车路协同环境建设,完善新型数字基础设施”、“将光谷科学岛整体打造高等级自动驾驶车辆商业化应用示范区,打造智能网联世界级科技创新策源高地、国家战略性新兴产业高地。”同时,本项目已列举入《东湖高新区2023年政府及国有企业投资计划》当中,项目建设必要性充分。
二、建设内容
1.总体架构
武汉光谷科学岛全域智能驾驶项目,总体框架以“单车智能+网联赋能”的中国方案为基础,推动全栈式技术路线部署,全面支撑高级别自动驾驶多场景落地。充分结合互联网+、人工智能、边缘计算等新兴技术,基于全量、连续环境信息,准确识别路网交通状态、事件、车辆等信息,提供数据采集、融合、预处理、分发等基本功能,实现对自动驾驶车辆、V2X网联车的安全辅助与效率引导支持。

图1总体架构图
系统总体架构分为:智能网联基础设施数字底座、信息服务支撑、应用平台、场景落地。
数字底座
包括摄像头、雷达、RSU、边缘计算单元等智能网联数字底座的感知设备。
通过摄像头、雷达等智能网联数字底座的感知设备对道路、交通、车辆数据进行采集,之后利用边缘计算节点上部署的感知引擎对感知终端所采集到的数据进行数据处理和AI算法处理,从而可以获得道路上运行的车辆、人员、事件以及交通流感知和分析结果实时传送到RSU并向车端发送。
服务支撑
包括云、网络、安全等为智能驾驶系统提供运行能力的IT信息支撑。为智能网联系统提供高效、稳定、安全的运行的环境。
应用平台
包括智能网联云控平台、智能网联可视化平台、智能网联汽车综合管理平台、智能网联汽车信息安全平台,对整个区域内的交通状况进行实时分析研判,发现区域交通运行中的各种问题、事件以及趋势,同时把智能网联大数据分析的结果实时发送到车端,与车端实现信息交互。
落地场景
落地场景包括自动驾驶接驳、自动驾驶观光、无人清扫、无人售卖、车路协同服务、高级别自动驾驶等应用场景。通过充分实现人车路的有效协同,支持L2-L4高级别自动驾驶车辆的上帝视角、冗余感知和超视距感知需求,保证多种自动驾驶车辆的安全行驶和通行效率。
2.技术架构
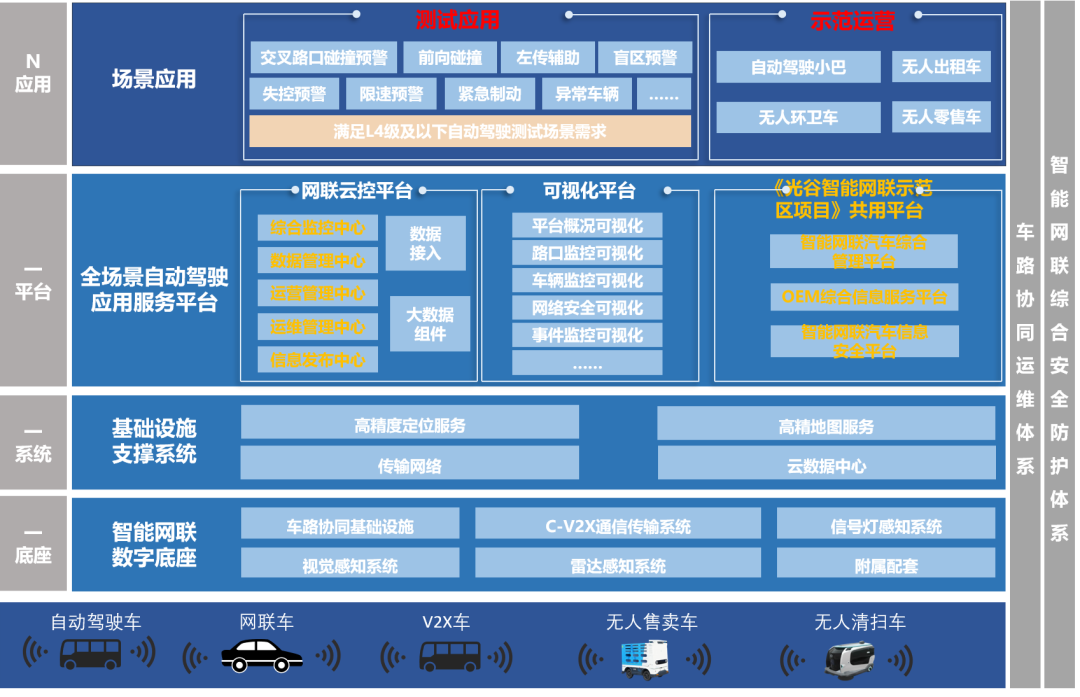
图2 技术架构图
本项目总体技术路线为智能化路侧感知设施+边缘计算,实现车路协同自动驾驶实现全场景自动驾驶。车路协同系统主要由智能网联数字底座、自动驾驶车辆、全场景自动驾驶应用服务平台和通讯系统四个部分组成。
3.网络架构

图3 网络架构图
为实现平台、车辆、路侧以及可视化前端大屏等应用场景的互联互通,本项目依托第三方的安全承载网络,4G/5G网络覆盖本项目涉及的范围。
无人驾驶车辆,路侧设备等通过4G VPDN/5G SA/5G NSA/4G TD-LTE等多类场景下的通信制式,实现了自动驾驶车辆和路侧设备与自动驾驶专属云平台上应用系统间的互联通信与信息处理;网络贯通云平台数据中心和路侧前端。
1.路口网络采用环形组网设计,负责路口内摄像头设备,RSU, 鱼眼摄像机以及边缘计算单元的数据传输和处理。
2.云平台数据中心(主要承载路侧边缘计算设备数据接入、可视化大屏系统以及云控平台系统的日常运营使用)与路口通过专网提供数据传输,满足100M(上下行各100M)的带宽与低于200ms的延时要求。
3.为了支撑应用平台的互联网数据需求,云平台数据中心具备200M互联网出口带宽。
4.为了支撑数据可视化系统在展厅的应用,需200M互联网出口带宽。
5.为了支撑数据可视化系统在展厅的应用,云平台数据中心通过1000M专线与展厅通信。
4.业务架构
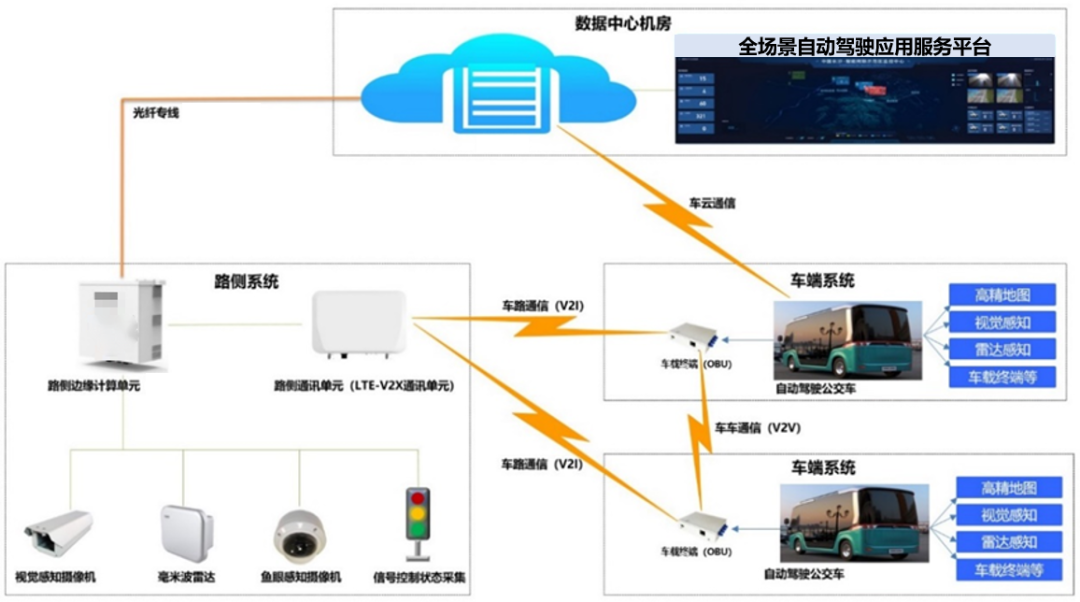
图4 系统业务构架图
在本项目智能网联系统当中,智能网联基础设施终端开展数据采集,通过路侧边缘计算节点上部署的感知引擎,对感知终端所采集到的数据以AI算法开展数据处理,从而可以获得道路上运行的车辆、人员、事件以及交通流感知和分析结果,以光纤网络将这些结果传输到全自动驾驶应用服务平台。
全自动驾驶应用服务平台,将这些精细和准确的道路交通高精动态信息,通过智能引擎平台强大的算力,对整个区域内的交通状况进行实时分析研判,发现区域交通运行中的各种问题、事件以及趋势,同时通过智能引擎中的车路协同引擎提供的业务融合模型为业务场景提供算法支撑,通过数据引擎进行多源数据的归集融合,通过地图服务引擎对上层业务应用提供支撑,满足多类用户需求,不断提升城市智慧交通管理治理水平。
5.典型应用场景
5.1高级别自动驾驶 “车”和“路”协同业务闭环应用场景
智能网联云控平台作为车路协同技术体系中枢,通过多种方式接入路侧设备、车辆和交通状态等多类数据,对汇聚于平台的动态数据进行综合处理后,为智能网联汽车与产业相关企业提供服务。平台具有实时信息融合与共享、实时计算编排、智能应用编排、大数据分析、信息安全等基础服务能力,可为智能汽车、管理及服务机构、终端用户提供辅助驾驶、自动驾驶、交通运输安全、交通管理等协同应用和数据服务,支撑高级别自动驾驶 “车”和“路”协同业务闭环应用。
智能路侧设备监控服务:负责对智能路侧设备进行监控、升级及数据交互。
交通监控服务:通过路侧的数据采集,提供交通事件的通知提醒服务;
车辆监控服务:为平台运营提供针对接入平台的自动驾驶车辆、智能网联车辆的监管服务。
视频监管服务:提供所有监控点位视频的实时监控、历史回溯等服务。
运营管理服务:提供路侧设备、车辆运营、信号灯点位管理,以及用户管理。
数据管理服务:对路侧系统和车辆交互数据进行管理。
5.2交通安全管理主动化应用场景
智能网联系统依托云端的能力,基于全局路网信息,得到多路段、多区域甚至是整体城市的交通状况、路况、以及突发事件等多维度的信息,以车辆、道路和环境等实时动态数据为核心,结合交通相关的设施和系统数据,精细化刻画路口交通状态,降低交通风险、提高交通效率,实现交通局部和全局的高效运行。同时,支撑智能网联技术多场景的业务应用,为智能网联场景、公众出行场景以及监管业务应用提供数据分析服务的支持。
另外,解决传统交通安全管理事后统计、被动治理的问题。结合智能感知和数据融合分析能力,对路口隐患数据进行全面研判,分析出高危路口和路口安全隐患点,有效增强隐患预防主动性,提升路口交通安全水平,实现安全管理从“被动”到“主动”的转变。
5.3城市交通运行状态数字可视化应用场景
智能网联可视化平台通过1:1还原高精度数字孪生城市底座,通过路口高精度感知设备,实时感知道路交通对象的速度、位置等信息,结合高精度地图路网、建筑物白模数据、精细化典型建筑物数据模型等地图模型数据,以可视化的方式在高精度地图路网基础上叠加展示车、路、城信息,高度还原城市交通运行状态。
5.4车企车联网功能应用服务场景
以运营管理与数据服务为主线,构建V2X数据服务、客户服务订阅、基础设施监测、数据服务计费等功能。平台充分提升数据价值,开放数据服务能力,为终端厂商提供数据服务,实现数据运营支撑。
通过提供电商化的产品管理和展现形式,为交通运营商提供了基本的运营载体;同时提供了产品的属性自定义、定价、交易流程等相关功能,配套实现了整体运营流程中所需要的工具;最后通过数据统计和分析工具,对整体运营效果进行监控和分析,实现不断提升运营能力和效果的目标。
5.5C端用户车联网服务场景
依托智能化设备对路口交通流状态进行实时全息感知,通过云端评估测算,向车载智能终端进行驾驶相关信息推送,采用语音和弹窗的方式,为驾驶员提供安全、效率信息服务,提高驾驶过程中的安全系数和行驶效率。
跳出智能交通行业以“管”为主的管理方式,响应交管“重教育,轻处罚”的管理理念,从服务于驾驶员的角度,向C端用户可通过手机终端APP、车内手机车机智能互联应用以及车内智能终端,提供广域信息,改善驾驶习惯,推送驾驶建议。
5.6多场景应用
国内智能车网联商业化应用多以单一项目开发为主,包括无人公交、无人观光车、无人配送车等。单一商业化应用场景打造导则路侧设备复用性不强、商业价值低、社会效益不明显、示范环境不真实。本工程全方位考虑无人接驳车、无人驾驶售卖、无人驾驶清扫等多种商业化应用需要,通过开放式的路侧接入环境和超强的边缘计算大脑,统筹各类自动驾驶车辆,打造一个面向未来自动驾驶车辆规模大、种类全的无人驾驶环境,推进各类无人驾驶商业化应用并行发展。
三、创新应用
(结合实际案例,总结案例的核心和创新亮点,体现案例的创新性和前瞻性)
1.案例核心
借助本项目建设的科学岛智能网联基础设施,通过在科学岛打造自动驾驶接驳、无人清扫、无人售卖等多类型应用场景,旨在培育面向未来的多场景智能驾驶示范应用,突出科学岛作为东湖科学城核心的科技创新引领作用。最终推动科学岛实现全域智能驾驶多场景落地。
围绕科学岛重点区域未来一路(岛内部分)、高新六路(科学岛核心区部分)、高新七路部署自动驾驶巴士接驳线路。
同时在部分区域部署无人清扫车和无人售卖车,以此区域为智能驾驶示范应用两点,加快推动出行服务创新模式快速落地。
2.案例创新点
2.1智能网联云控平台
目前,国内普遍存在智能车网联平台功能单一的问题。绝大部分功能是针对封闭测试场的以及自动驾驶车辆调度的,平台设计不闭环,未真正意义上考虑运营。本工程平台设计遵循两大原则:一是创新、开放、共享;二是集管理、展示、监管、服务于一体的闭环应用。基于以上原则,打造两大体系:车路智行管理与服务应用体系、智能网联交通管理与服务体系。
基于数据技术底座,利用车联网、V2X、AI等新兴技术,向网联车辆、非网联车辆以及出行服务窗口提供信息支撑,构建面向车路协同、出行服务等创新应用支撑系统,目前,国内智能网联汽车道路测试项目众多,普遍存在道路较封闭、场景较单一、社会交通参与少、网联化程度底、测试车辆少等现象,导则该类项目实用性差,难以创造价值。测试项目规模远超于自动驾驶汽车研发测试需求,导则大量道路测试项目闲置。本次科学岛全域无人驾驶项目以高级别自动驾驶车辆上路试点通行为出发点,超前部署试点环境,选择场景丰富、交通真实、需求明显的综合商务区、生态居住区、工业制造区打造上路试点区域,通过全方位、高精度、多角度的技术保障,确保高级别自动驾驶车辆安全、高效上路试点。

图5 智能网联云控平台
2.2车-城市深度融合
基于智慧灯杆构建包括C-V2X系统、通信系统、感知系统、边缘计算系统、微气象和道路环境系统,实现智能交通与智慧城市的深度融合。
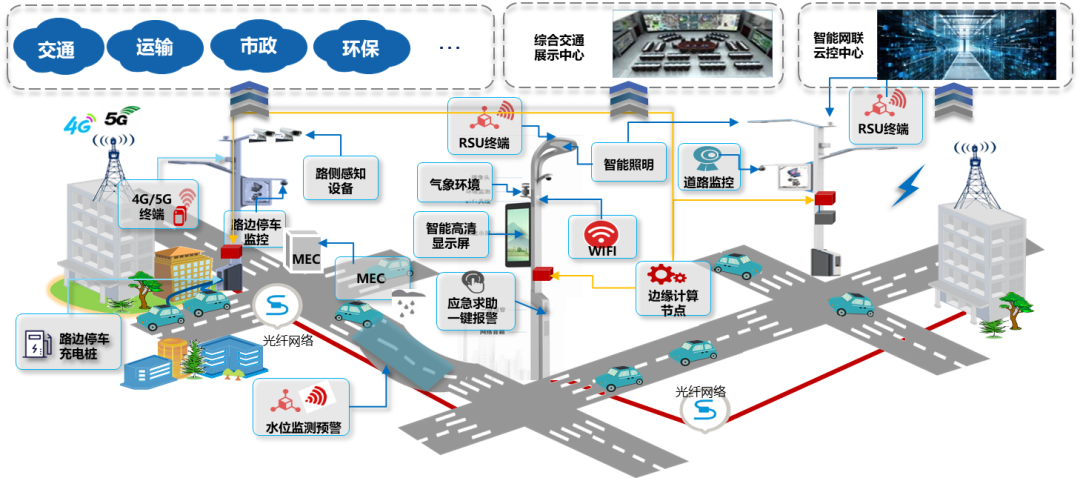
图6 车-城市深度融合示意图
2.3 5G远程驾驶
基于5G技术,与车辆底盘线控设备以及视频采集设备进行数据交互,实现对网联车的实时监测和管控。在监控中心发现L4级无人车有异常时,可人工接管车辆,通过远程驾驶将车辆行驶至安全地带;进一步提高可管可控、可视安全的运行支撑。
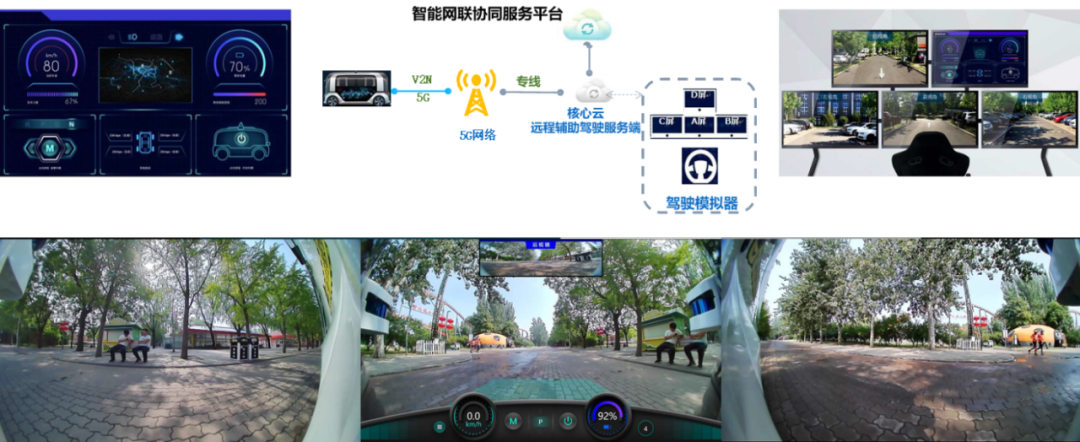
图7 5G远程驾驶
四、推广价值
本项目建设的车路协同系统建设的目的主要在于应用推广,将路侧通信感知设备、市政设施、公共设施等在内的基础设施与车辆整合到一个平台,采取统一的接口、标准及规范进行管理、运营和维护。
系统与高新区智慧城市大脑、交管平台以及城管平台等平台数据对接,实现城市智能基础平台数字底座的搭建,进而形成高新区的统一数据组织形式、统一数据格式、统一数学基础的基础地理信息,并可以直接叠加专业信息进行基于空间信息的行业管理,也可以在此基础上再进行深层次的应用开发,为城市交通的监督管理和精细化治理提供数据支持,促进智慧城市基础设施和智能网联汽车的融合发展具有重要推广价值。
光谷科学岛全域L4智能驾驶全场景项目落地后,将逐步形成车联网产业生态集群,拉动产业发展,探索网联运营的创新模式,进一步提升优势产业赋能作用,推动传统汽车产业转型升级,形成内部黏性高、产业协同力强的细分产业链。
在武汉光谷科学岛全域智能驾驶项目中以“多杆合一,多感合一”为规划原则,高标准建设科学岛智能网联数字底座,涵盖约120个路侧点位,覆盖52公里道路,筑巢引凤,逐步实现全场景测试应用落地,目前项目已完成无人巴士、无人清扫车、无人出租车、无人售卖等多种商业化场景应用,为其他区域提供可复用推广性的示范作用。
1.赋能单车智能,加速商业化落地
单车智能是在车辆在不依赖于其他车辆或基础设施的情况下,通过自身的传感器和算法实现自主驾驶。无人驾驶技术主要依赖于高级传感器(如激光雷达、毫米波雷达、高清摄像头等)、高精度地图、以及复杂的算法来实现环境感知、决策规划和控制执行等功能。由于单车智能在处理复杂路况的局限性,自动驾驶的实现还需要车路协同(V2X)的配合,通过路侧传感器结合密集的感知算法的计算,得到所有道路使用者(包括机动车、非机动车、行人等)的3D位置,速度,加速度,运动轨迹等实时信息。这些感知信息是实现无人驾驶的关键信息,自动驾驶只有获得了准确,全面,实时的感知信息,才可以进行后续的决策规划和控制,才能实现安全的无人驾驶。本次武汉光谷科学岛在复杂路口建设车路协同(V2X)赋予单车智能更高的自主性,使车辆能够在复杂的道路和交通条件下安全、高效地行驶,无人驾驶技术为单车智能提供了强大的支持,并正在加速商业化落地。
2.提升道路安全,降低事故发生
武汉光谷科学岛全域智能驾驶场景项目在通过建设路端感知机云端云控平台,可以通过车辆与道路之间的信息交互,实现交通智能化的优化和调整。例如,车辆可以通过与道路的交互,获取道路的实时信息,如交通信号灯、路标等,从而及时调整车速和行驶路线,避免违章和违规行为。此外,车辆还可以通过与道路的交互,获取其他车辆的信息,如位置、速度等,从而避免交通拥堵和交通事故的发生,提高交通智能化;车路协同的意义和作用不仅仅是提高交通效率,还包括提高交通安全性、提高交通环保性和提高交通智能化等方面。随着车路协同技术的不断发展和应用,未来的交通运输系统将会更加安全、高效、智能和环保。
3.缓解交通拥堵,提高通行效率
智能交通车路协同系统是基于车载终端、路侧设备和交通管理中心等多个组成部分构成的智能交通系统,可以实现车辆之间的信息共享和交互,提高道路安全性能和交通效率。通过车载终端用于收集车辆的位置、速度、方向等数据,并将数据传输到路侧设备或交通管理中心。路侧设备安装在道路上,用于与车载终端进行通信,收集车辆数据,并将路况信息传输到交通管理中心。交通管理中心负责收集和分析交通数据,识别异常路况信息,并将信息同步到其他车辆的车载终端上,提供实时的路况信息和驾驶辅助服务。武汉光谷科学岛全域智能驾驶场景项目基于交通数据和路况信息,提供各种智能交通应用服务,如实时导航、智能停车、交通信号优化等,减少交通拥堵,提高交通流量,通过交通管理中心对交通信号进行优化,减少交通拥堵,提高交通流量,缩短行车时间,提高交通效率。
4.赋能监管运营,优化城市治理
基于无人驾驶技术收集的大量交通和环境数据,城市规划部门可以更加科学地进行城市规划。这有助于实现城市资源的合理配置,提高城市空间利用率,促进城市的可持续发展。通过优化交通运营、提高道路通行效率、降低公共交通运营成本等方式,无人驾驶技术为城市管理赋能监管运营,优化城市治理。同时,该技术还能提升市民的出行体验和生活质量,促进城市的社会和谐与发展。
5.支持从“单一商业模式探索”向“多种商业应用并行”推进
目前,国内智能车网联商业化应用多以单一项目开发为主,例如无人公交、无人观光车、无人配送车等。单一商业化应用场景打造导致路侧设备复用性不强、商业价值低、社会效益不明显、示范环境不真实。本工程全方位考虑无人巴士、无人清扫车、无人出租车、无人售卖等多种商业化应用需要,通过开放式的路侧接入环境和超强的边缘计算大脑,支持统筹各类自动驾驶车辆,打造一个面向未来自动驾驶车辆规模大、种类全的无人驾驶环境,推进各类无人驾驶商业化应用并行发展。
推荐阅读
✩以数字孪生技术赋能城市治理,提升广州塔景区综合环境“智治力”
✩“一图感知全态、一图指挥共治”,探索社会治理智慧化海珠路径
✩以数字孪生技术赋能城市治理,提升广州塔景区综合环境“智治力”